Синхронный двигатель с постоянными магнитами
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор - неподвижная часть, ротор - вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором - электродвигатели обращенного типа.
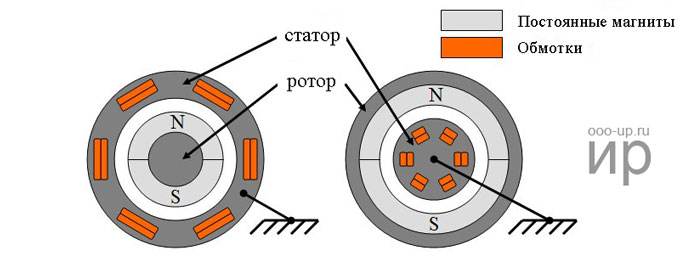
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
- По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM - surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM - interior permanent magnet synchronous motor).


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,...., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток - невозможность влияния на форму кривой ЭДС [2].


- Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например - компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является - трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
- Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно - по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
- Существует два способа определения положения ротора:
- по датчику положения;
- без датчика - посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
- В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
- Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом - запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.